Su montaje no es complicado. Como todo en la vida necesitamos conocimientos, los materiales y paciencia. Una placa Arduino, un chasis con ruedas, pilas, unos cables y ya esta nuestro coche teledirigido. Necesitaríamos instalar una aplicación en nuestro teléfono móvil, pero también se puede hacer mediante un cable y manejarlo con un joystick. El esquema de funcionamiento es simple. Placa Arduino, controladora de motores, dos motores y cableado, todo en un soporte de metacrilato con sus tornillo y sujeciones.
Conexiones
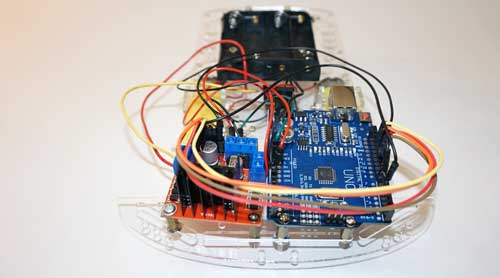
La verdad es que parece una maraña de cables pero siguiendo las instrucciones de montaje correctamente es fácil.
Hay que conectar los motores a la controladora de motores y esta a su vez a la placa Arduino, en sus puertos correspondientes.
Conectar las pilas a la placa y poner un interruptor.
El trabajo es divertido y los alumnos de papa Robot se llevan su coche teledirigido a casa.
Programación
El montar el coche teledirigido nos ha quedado muy bien, pero ahora viene lo divertido. Programar la placa para que el coche se mueva. Usamos Scratch y S4A. Esta programación esta orientada a manejar puertos analógicos y digitales. Para que nuestro coche funcione correctamente hay que añadir los módulos para Arduino y el modulo inalámbrico.
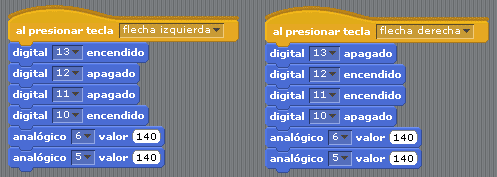
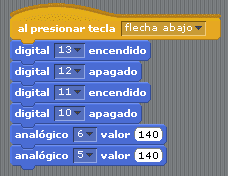
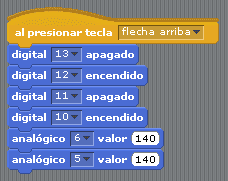
El estilo de programación es el mismo que en Scratch, por bloques.
Aquí vemos como se programa el movimiento con las flechas del teclado para que las ruedas respondan al sentido que marca la flecha.
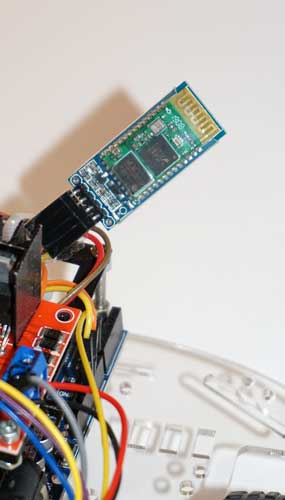
Y bluetooth
El paso final es poner un modulo bluetooth para así poder manejar el coche con el teléfono móvil.
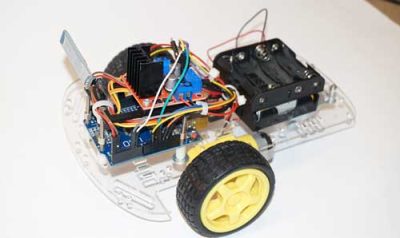
Resultado final
El resultado finales un coche teledirigido funcional que funciona muy bien.
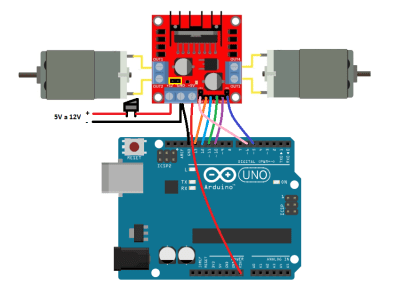
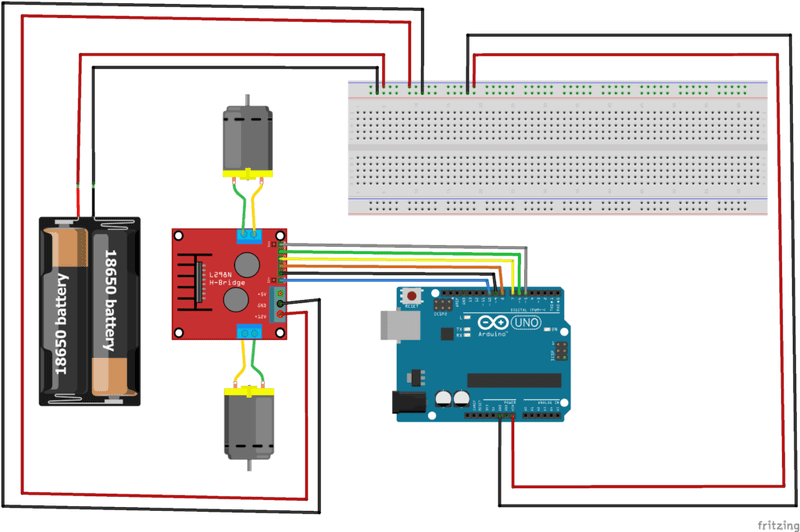
Esquema del coche. Prototipo.
Este esquema clarifica mucho la estructura del coche.
Se pueden ver todas las conexiones.
La conexión de los dos motores con la placa controladora.
Tenemos la alimentación, por parte de las pilas, de los motores, la placa controladora de motores y la propia placa Arduino.
Y por ultimo conexión de la placa controladora con Arduino en los diferentes puertos, donde programaremos el encendiendo o apagado de los diferentes puertos digitales o analógicos, para dar las ordenes de movimiento a los motores y por consiguiente haciendo que las ruedas se muevan.