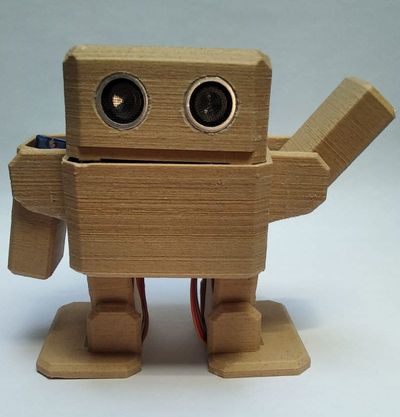
Otto es un robot interactivo y muy fácil de construir.
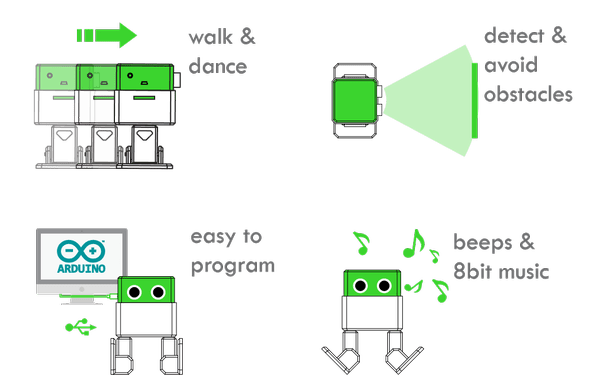
Lo que Otto puede hacer
Otto puede caminar, detectar objetos, puede reproducir música para expresar su estado emocional y además es fácil de programar.
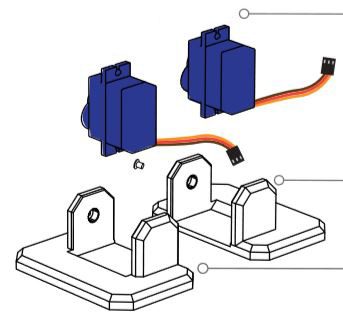
Los pies de Otto
Hay que insertar los servomotores en las piezas del pie impresas en 3D. Atornillamos el servomotor. Lo hacemos con los dos pies, claro.
Las piernas de Otto
Insertamos los servomotores de las piernas en el cuerpo de Otto y los atornillamos a las piernas, por su parte superior.
Ajustamos motores
Una vez que tenemos atornillados los servomotores en su sitio, bien sea en el pie o en la pierna, tenemos que ajustar el ángulo del servo para que cuando Arduino ejecute su programa el angulo del servo sea perfecto.
Todos los motores
La operación de ajustar los ángulos de los servomotores hay que hacerlo en todos los servos.
El cuerpo de Otto
Hay que insertar dos servomotores en el cuerpo. Estos dos servos son los que moverán las piernas de Otto.
Ajustamos las piernas
Y por supuesto hay que ajustar, también, los ángulos de los servomotores.
Los pies y las piernas de Otto
Una vez colocadas las piernas procedemos a colocar los pies en su sitio.
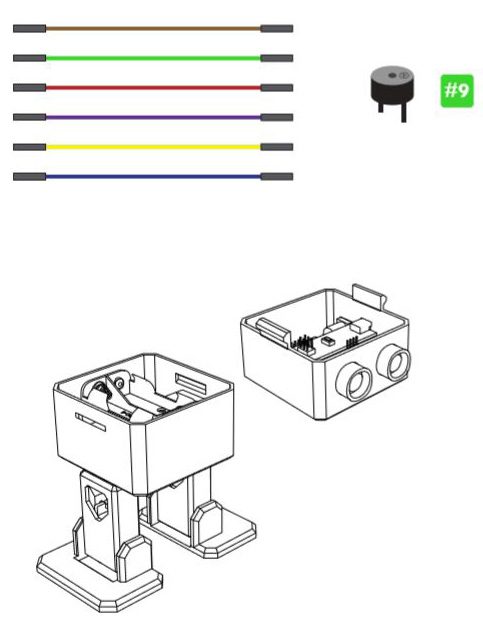
Los ojos de Otto
Colocamos el sensor que hace de ojos de Otto. Este sensor es un medidor de distancias, es que hace que Otto no se choque contra un obstaculo.
Arduino y Otto
Insertamos la placa Arduino en el shield y estos a su vez los atornillamos a la cabeza de Otto.
La fuente de alimentación de Otto
Colocamos las pilas justo en el medio del cuerpo de Otto.
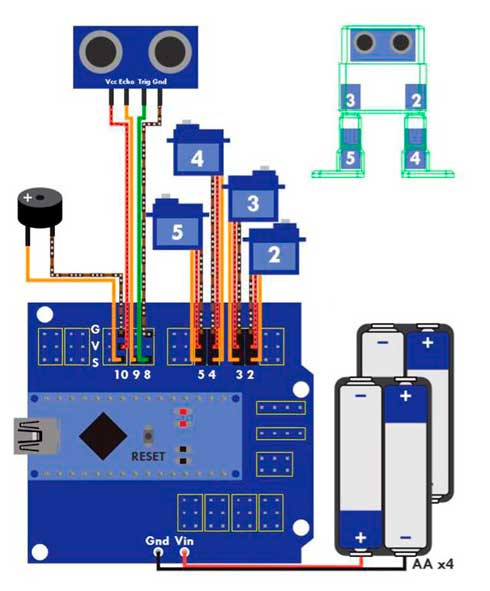
El cableado de Otto
El paso final es poner el cableado correspondiente, de cada servomotor, con el puerto correspondiente de la placa Arduino. Además de poner el sensor zumbador, sin este componente no se oiría a Otto cantar.
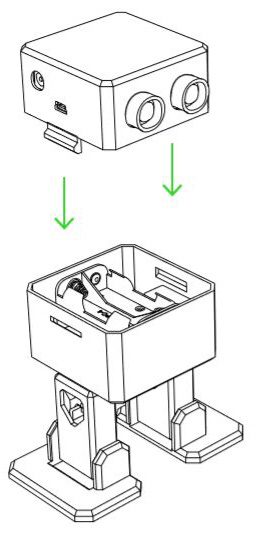
Paso final
Colocamos la cabeza en la parte superior del cuerpo de Otto y a disfrutar.